











|
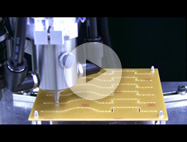
由相机对X轴,Y轴偏移量进行确认,由激光高度传感器对高度的变化进行连续测量,根据其结果一边进行偏移量补正一边实现点胶作业 |
|
|
 |
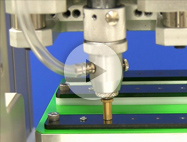
校准简单,重点介绍使用「自动校准功能」,通过简单的鼠标操作编辑点胶程序的教导方法 |
|
|
 |
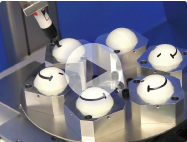
有效地缩短节拍时间,利用JR3000系列的「带计数器的CCD相机补正功能」 该功能在桌面型机器人JR3000系列系列和直交机器人JC-3系列都可以使用 |
|
|
 |
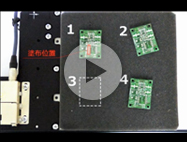
4轴机器人进行XY位置补正 |
|
|
 |
从JR3000系列系列开始新追加的「4轴」针头校正功能 该功能在桌面型机器人JR3000系列系列(点胶规格)和直交机器人JC-3系列(点胶规格)都可以使用 |
|
|
![]()


![]()



![]()





![]()
![]()
![]()
Copyright © JANOME Corporation. All rights reserved.
![]()