- 示教器 2種
- 附带紧急停止开关
- 附带紧急停止开关、启用开关
- 开关盒 4種
- 附带初始化开关
- 附带初始化开关、模式切换开关
- 附带初始化开关、清除开关
- 附带初始化开关、模式切换开关、清除开关 - 电缆套装(本体-控制器连接用:3m/5m)
- 电缆拖链套装(X轴用/Y轴用)
- I/O-SYS线、I/O-1线
- 探针调节器
- PC软件『JR C-PointsII』(兼容 Windows® 10, Windows® 11)
JC-3 Series
正交机器人 JC-3系列
多功能、易使用的正交机器人
机种型号的确认方法
例
※可以往侧边滑动
| (1) 种类 |
(2) 规格 |
(3) 支撑状态 |
(4) 控制轴方向 |
|---|---|---|---|
|
JC-3系列 |
C0N:相对增量规格 ※2轴 A00:相对增量规格 ※3轴 B01:相对增量规格 ※4轴 D00:绝对位置规格 ※3轴 D12:双X轴驱动规格 ※3轴 |
T:单脚 H:双脚型 W:双脚型(双X轴驱动规格) |
2:2(XY) 3:3(XYZ) 4:4(XYZR) |
主要规格
※可以往侧边滑动
| JC-3A00-0T3 | JC-3A00-0H3 | JC-3B01-0H4 | ||
|---|---|---|---|---|
| 控制轴方向 | 3(XYZ) | 3(XYZ) | 4(XYZR) | |
| 行程 | X轴 | 200/300/400/500/600 mm | 300/400/500/600/700/800/850 mm | 300/400/500/600/700/800/850 mm |
| Y轴 | 200/300 mm | 200/300/400/500/600/700 mm | 200/300/400/500/600/700 mm | |
| Z轴 | 50/100/150/200 mm | 50/100/150/200/300 mm | 100/150 mm | |
| R轴 | - | - | ±360° | |
| 驱动电机 | 步进电机 | |||
| X・Y・Z轴(反馈控制) | X・Y轴(反馈控制) Z・R轴(开回路控制) |
|||
| 最大可搬质量 | 4kg | 8kg | 3kg | |
| 最大速度<PTP驱动>*1 | X轴 | 600~800mm/s | ||
| Y轴 | 600~800mm/s | |||
| Z轴 | 400mm/s | |||
| R轴 | - | - | 900°/s | |
| R轴容许惯性力矩 | - | - | 90kg・cm² | |
| 単轴位置重复精度*2 | X轴 | ±0.02mm | ||
| Y轴 | ±0.02mm | |||
| Z轴 | ±0.02mm | ±0.01mm | ||
| R轴 | - | - | ±0.008° | |
| 外形尺寸(突起部分除外) | 本体 | W:Y轴行程+319 mm D:X轴行程+309 mm H:Z轴行程+357 mm |
W:Y轴行程+426 mm D:X轴行程+309 mm H:Z轴行程+357 mm |
W:Y轴行程+426 mm D:X轴行程+309 mm H:Z轴行程+334 mm |
| 控制器 | 170 x310 x 300 mm | |||
| 质量 | 本体 | 基于行程的组合。详细规格请另行查询。 | ||
| 控制器 | 7.5kg | |||
- *1 组合轴以后的最大可搬重量的数据。根据工具的安装位置,有时会无法达到最大速度。详细规格请另行查询。
- *2 单脚位置重复精度的规格,在机器人本体温度一定的情况下,由弊公司规定的测量方法(依据JIS规格)来测量的数据。并不保证绝对精度。
- 根据规格・种类,表格的数据不同,详细咨询。
通用规格
※可以往侧边滑动
| 控制方式 | PTP(Point to Point)控制、CP(Continuous Path)控制 | |
|---|---|---|
| 插补功能 | 3D直线插补、3D圆弧插补 | |
| 位置示教方式 | 远程示教(JOG)/数値输入(MDI) | |
| 示教形态 | ・示教器(可选)直接示教基于 ・PC软件“JR C-PointsⅡ”(可选)的计算机脱机示教。可以运用通过CAD等制作的图形(DXF、Gerber、JPEG)。 |
|
| 示教器界面显示 | 显示语言 | 日语、英语、法语、西班牙语、意大利语、德语、韩语、中文(简体字・繁体字)、捷克语、越南语 |
| 程序数量 | 999项程序 | |
| 点存储容量 | 最大32,000点*3 | |
| 简单的PLC功能 | 最多100个程序、最多1000个步骤/程序 | |
| 外部输入输出 | I/O-SYS*4*6 | 输入16点/输出16点 |
| I/O-1*4*6 | 输入8点/输出8点 | |
| I/O-MT(可选) | 补助轴(脉冲列输入电机*8)控制用 可控制最多2轴 |
|
| 现场总线 (可选) |
CC-Link、DeviceNet、PROFIBUS、PROFINET、CANopen、EtherNet/IP | |
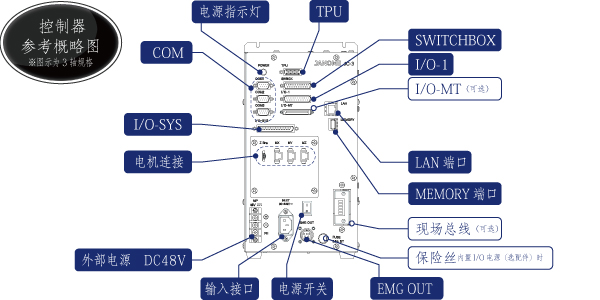
| COM | RS232C COM1、COM2、COM3:外部机器控制用 |
|
| MEMORY | 用于USB的连接 ・客戸自定数据、教導数据的读出、保存 ・升级系统软件 ・机型设定数据的更新 |
|
| LAN*5 | 用于通过以太网的计算机连接 ・基于控制命令的机器人控制 ・PC软件『JR C-Points II』(可选)的连接 (客戸自定数据、教導数据接收和发送、升级系统软件) |
|
| TPU | 示教器(可选)接続专用 | |
| SWITCHBOX | 开关盒(可选)连接专用 | |
| EMG OUT | 外部安全回路接続用*9 | |
| I/O用内置电源(可选) | DC24V | |
| 电源*10 | 输入接口AC100-240V(单相)50/60Hz + 外部DC48V(基于设备供电)*7 | |
| 消耗电力 | 150W(AC电源)、300W(DC48V、驱动用电源) | |
| 使用环境 | 周围温度 | 0~40°C |
| 相对湿度 | 20~85%(无结露) | |
- *3 由于采用共用的存储区域,因此当点属性数据、点作业数据、序列器数据增加后,点数据的存储数量则会减少。
- *4 使用内部电源时需要有用于I/O的内置电源(可选)。
- *5 以太网连接为10BASE-T/100BASE-T。
- *6 I/O有「PNP规格」「NPN规格」两种
- *7 关于4轴规格,由外部48V电源向XY轴供电,由24V控制电源向ZR轴供电。
- *8 请客户自行准备控制电源、脉冲电机、脉冲驱动器。
- *9 请客户自行构建安全线路。
- *10 AC100V/200V电源及DC48V电源请客户自行准备。
- 本体的各轴属于单独的,需要客户组装。
- 还有上述以外的规格,请咨询。
- 关于可选件式样仅在订货时可获悉。
- 本公司可能不经预告而对规格进行变更。
标准附属品
- 电源线缆
- 示教器用短接连接器
- 开关盒用短接连接器
- EMG OUT用连接器
- 控制器壁挂用安装板
- 使用说明书(CD-ROM)