承接特殊规格
如有特殊尺寸・形状等规格要求也可对应。还请咨询。
可应对多种生产设备的旗舰桌面机器人
可更高速、更准确地进行作业,并且提升刚性使其能够被长期安心的使用。使其高速运转时的轨迹性能更趋稳定。
在Z结构中装入摄像头时,动作停止时的震动时间大幅度缩短,并且等待时间也大约缩短一半。(与本公司的产品相比)
本公司产品中尺寸大于JR3300的机型已在相关技术条件下实现最大速度900mm/sec、工件最大质量15kg、工具最大质量7kg。
可有效应对有高度限制的生产现场等。内置Z轴用电线、机器人上部简洁化的设计理念。

有效应对现场总线使其与自动生产线和自动机械的嵌入更加简便。程序编号的设定、启动不言而喻,还能进行位置信息的获取和程序的重写。
现场总线的模组可从“DeviceNet”、“PROFIBUS”、“CC-Link”、“EtherNet/IP”、“PROFINET”、“CANopen”中进行选择。
与电脑连接,可以发送或接收示教数据,也可以从电脑进行多台的运行情况管理。
对应日趋精细化的生产作业将摄像头功能进行强化。
在原本方便的位置補正機能之上,又追加了自动校准功能和带计算的CCD摄像头補正機能等,进一步增大了摄像头系统的运用机会。
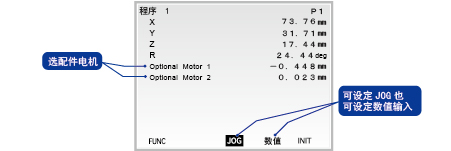
与机器人轴的操纵相同,本产品在示教器上可示教2台以内的步进电机和伺服电机等脉冲列输入形式的装置。“设置转盘可改变工件的方向”、“通过机器人来控制所设置的传送带”等用途多种多样。
为了让海外的众多人员也能使用,示教器的显示语言可从中文(简体字・繁体字)、日语、英语、法语、西班牙语、意大利语、德语、韩语、捷克语、越南语11种语言中进行选择。
配备了用于螺丝锁拧作业・点胶作业的专用软件和具有高通用性的标准软件。
因为是针对各类应用的专用软件,所以初学者也可容易地进行示教,同时也可以使用丰富而多样的命令组。
想使用视觉系统补正位置时,一直以来较为费时的摄像头校准(将摄像头的坐标转换成机器人坐标)在登录摄像头的校准标记之后就可自动进行。
可供使用的摄像头系统*1
[生产商] Panasonic (型号)A110・A210、PV200・PV260・PV300・PV500
[生产商] Keyence (型号)CV3000、CV-X100・CV-X200・CV-X400、XG-8000・XG-X系列
[生产商] OMRON (型号)FH系列、FQ系列
*1 也有已停产的情况。详情请咨询生产商。
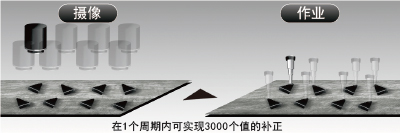
强化了边在摄像头上进行位置补正边进行作业的功能。因为在机器人中可导入不超过3000个补正值,所以针对以托盘形式排列的工件进行作业时,不是“摄像”→“作业”→“下一工件的摄像”→“对下一工件进行作业”・・・的反复循环,而是“连续摄像”→“连续作业”,很有效地缩短了作业时间。
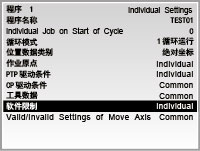
在所有程序中同一设定较多的“作业原点”、“软限制”、“PTP驱动条件”等项目使共通设定已成为可能。因为设定只要进行一次,所以有助于示教时间的缩短和条件的修改。当然,也可任意切换成个别设定。
点胶机上记忆喷嘴顶端的位置后,当喷嘴更换和注射器更换中喷嘴顶端发生位移时,检测、补正此位移量,可进行与更换前相同点胶的“探针调节功能”不仅是在原有的3轴机上,如今在4轴机上也已成为可能。如果注射器更换时喷嘴位置的调整很费时,那么请一定利用该功能。

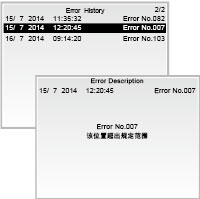
可显示错误发生的日期和时间。
因为可以特定错误发生的时间,所以有助于原因的解析等。错误记录可保留最近发生的1000次错误。
关于机器人的功能,因为内置了单独运作的简易PLC,所以如果是和外部机器进行简单地通信则无需另外购置。
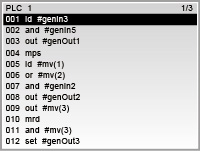
通过要点作业数据将频繁使用的命令列进行登录,那么之后的示教作业就变得很容易了。也可制作针对用户的个性化软件。
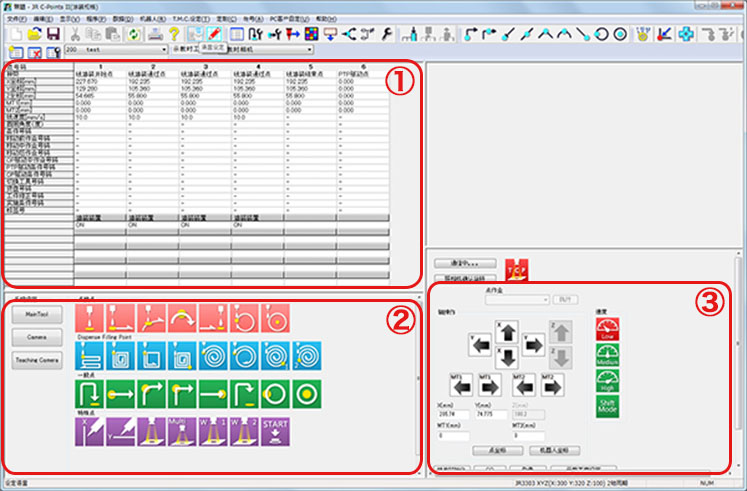
JR C-PointsⅡ”是JANOME独创对话式程序输入系统,在计算机上示教数据,以及自定义数据的制作、编辑和保存。可更加轻松地进行基于数值输入的point设定和point作业命令的制作、编辑等。
就像使用电子表格一样也可以进行坐标数据的复制和粘贴等。另外,能以图形形象地制作、编辑路径数据的“point图表编辑功能”使操作更加方便。
可将“JR C-Points”的示教数据转换成“JR C-PointsⅡ”用数据。
①程序区域
程序编写数据,可以直接输入或编辑。
②基本操作区域
利用图标,可以简单做程序。
③机器人操作区域
使用操作图标,可以直接操作。
通过连接购买的USB相机*,电脑上扩大图像指定点,只需要选择图标,就可以简单正确编程。
(* 关于USB相机的对应可否,请咨询。)
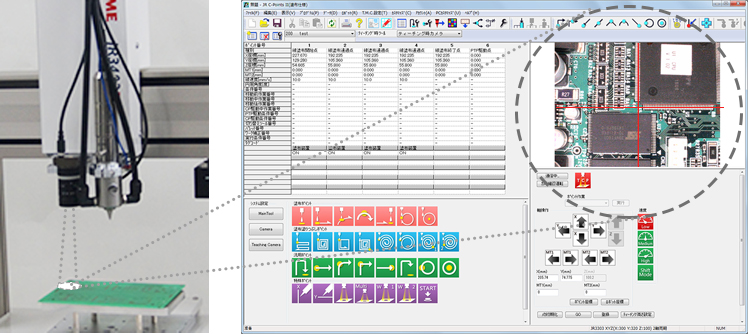 机器人移动,使点击位置移到界面的中央。
机器人移动,使点击位置移到界面的中央。

以DXF数据为基础设定point之后可获得正确的位置数据

参考JPEG图像设定point
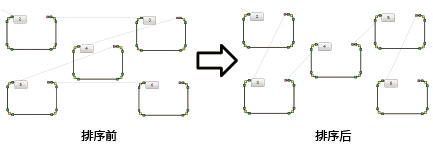
Point之间的移动距离较大所以按“从左开始的顺序”进行排序

点击连接点,指定R的半径
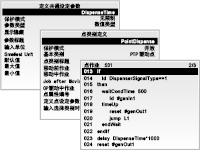
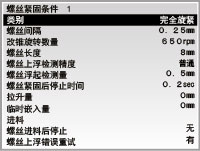
备用锁拧螺丝,点胶的专用软件。
通过锁拧螺丝专用的应用软件,示教是只要设定螺丝长度、间距、螺丝刀转数等锁拧螺丝条件,然后指定锁拧位置。
应用程序实例

已安装锁拧螺丝组件、螺丝供给机的示例
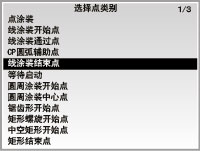
只需通过设置作业位置的点胶、线点胶等各种涂装条件,即可方便地编制作业程序。
应用程序实例

已安装供料器的示例
点胶
变更针筒和工件的角度,点胶实例
筒形工件的外周也可点胶。
螺丝锁拧
不同角度下都可进行螺纹紧固的实例
可调电动螺丝刀的角度。