承接特殊规格
如有特殊尺寸・形状等规格要求也可对应。还请咨询。
扩大了桌面机器人的可能性的新旗舰机型
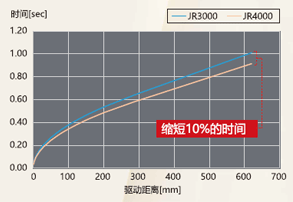
JR4300以上的机型、实现最高速度1000mm/sec、最高加速度3400mm/sec2。
实现了业界领先的速度,可缩短节时间。
Y轴的上部后面都配备了装置安装用的槽,方便配线。
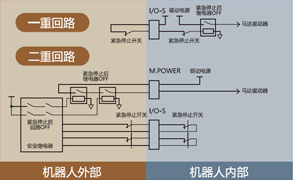
旧机型的安全范畴1、性能等级PL=c的基础上、为了对应更多危险的作业、危险的设备、可通过外部构建安全回路(包含马达电源切断继电器)、实现安全范畴3、性能等级PL=d、可实现驱动电源切断的二重化构建。
可连接2个步进电机或伺服电机等「脉冲序列输入类型」。
2种控制模式+编码器输入功能、可对应多种不同的用途。
①点模式 动作与机器人X・Y・Z・R轴联动。
『安例 - 4轴点胶机实现6轴的动作』
通过附加轴去改変针筒的角度和工件的角度,使得筒状工件的外围开口的侧面点胶可实现。
②独立模式 动作与机器人X・Y・Z轴独立。
『安例 - 传送装置动作的同时机器人进行作业』
因为与点的坐标・动作独立分离、可实现传送装置动作的同时,机器人进行点胶或打螺丝等作业。
③编码器输入 从外部读取编码器的值,对回转量进行监视,判断等控制。
使用位置补正相机AS200(可选)、可对工件位置进行补正、实现准确的作业。
机器人还有相机都可以通过本公司的PC软件「JR C-Points Ⅲ」、进行筒单设定,不需要使用相机专用的软件。


除了旧机型所使用的控制信号、使用点作业命令实现的数据交互功能之外、追加了指定类型的数据实时输出「现场总线 寄存器输出功能」。
因此、不需要进行复杂的设定、随时可以从PLC读取到必要的数据。
自带的点类别里面没有包含的作业,也可以通过点作业命令进行自由的编程。
使用可能的命令或内置的函数比旧机型有所增加、可自定义的功能也进行了扩充。
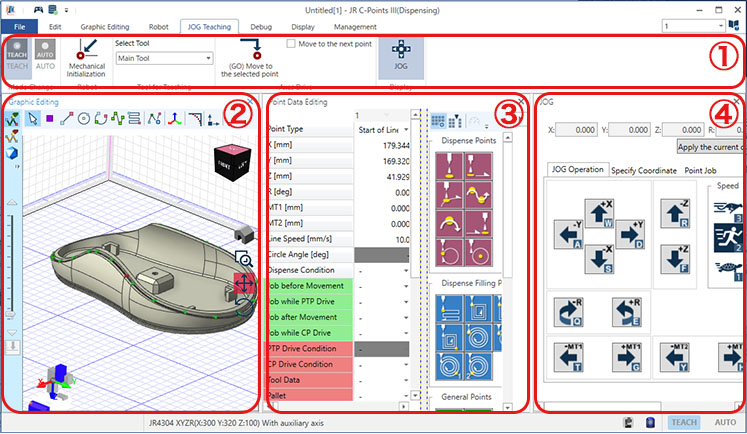
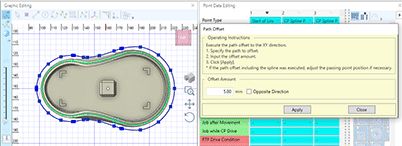
PC软件『JR C-PointsⅢ』、可在电脑上进行示教数据或自定义数据的作成・编辑・保存的JANOME独自开发的对话式操作软件。
动作轨迹的坐标可生动的显示,可更加直观的把握程序的内容,同时可进行CAD数据的坐标转换。另外设定参数也可以树状显示使得数据的确认·编辑更加方便。
「JR C-PointsII」的示教数据、可转换成「JP C-PointsⅢ」的数据进行使用。
①功能区控件
通过点击各个项,对应的功能或设定项目即会显示出来。
②图形编辑视图
3D显示的图形编辑区域。通过使用3D视图、可更加直观的进行程序示教。
③点数据编辑视图
可对选中的点数据列的点类别或坐标位置、点作业命令等参数进行直接编辑。
④JOG视图
通过连接JR4000机器,可通过PC直接进行JOG动作。
可对应3DCAD数据的读入,通过读取到的数据自动生成点坐标,可大幅减少示教的时间。
增加了新的点作业类别「样条曲线驱动」、可对应复杂的工件形状。
点坐标可通过图形编辑功能简单的进行偏移或扩大・缩小。
调整到适用于实机的坐标,也可以通过简单操作实现。
根据PC软件上显示的快速向导,选择对应的项目或功能,就会显示对应的使用说明。不需要查阅说明书同样可以确认机器的功能内容
普通的PC与平板PC、可通过用户接口进行切换使用。
即使环境不同也可以快速作业。

※使用平板PC的时候,为了安全请使用Safety Commander
※Safety Commander是IDEC公司的商标或登录商标。
多机台进行相同作业的情况下,使坐标数据适用于每台机的个体差,转换成适用于写入机台的坐标的功能。可节省微调整的时间,提高水平展开的效率。
通过管理者权限的Windows账户可进行密码设定、可限制其它账户进行数据保存或变更的操作。
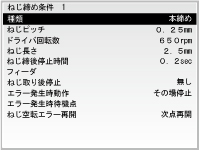
备用锁拧螺丝,点胶的专用软件。
通过锁拧螺丝专用的应用软件,示教是只要设定螺丝长度、间距、螺丝刀转数等锁拧螺丝条件,然后指定锁拧位置。
应用程序实例

已安装锁拧螺丝组件、螺丝供给机的示例
只需通过设置作业位置的点胶、线点胶等各种涂装条件,即可方便地编制作业程序。
应用程序实例

已安装供料器的示例